")
Un método novedoso para explorar las dunas de arena de Marte es el Valles Marineris Explorer, o VaMEx. VaMEx es un proyecto de la Agencia Espacial Alemana en el Centro Aeroespacial Alemán (DLR). El objetivo de la iniciativa es diseñar un enjambre de robots heterogéneos y autónomos para explorar Valles Marineris en Marte, anunciado como el “Gran Cañón” en el Planeta Rojo.
Valles Marineris es un enorme sistema de valles en Marte que los científicos quieren explorar en busca de rastros de agua líquida, que puedan existir en nichos protegidos y servir como hábitat para una posible vida. Pero la región es difícil de investigar debido a su topografía, lo que plantea desafíos para la topografía robótica.
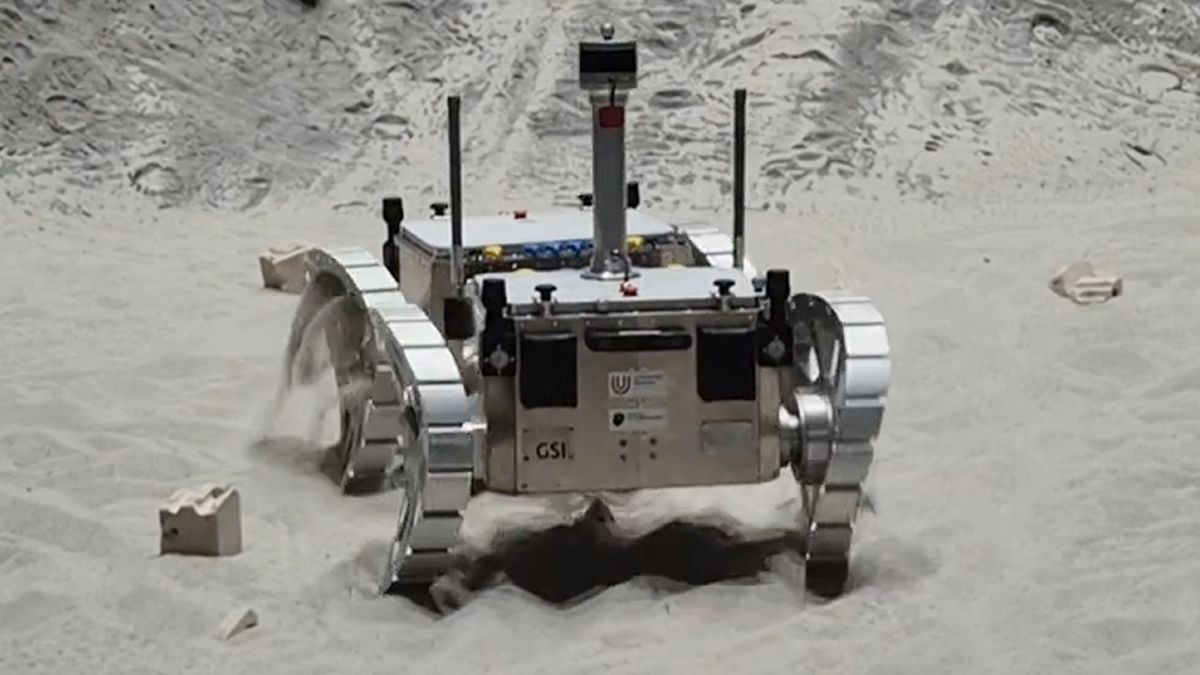
Pero el equipo de VaMEx está explorando combinaciones de sistemas de conducción, caminata y vuelo para aprovechar lo que cada concepto aporta en términos de investigar conjuntamente un área grande con características ambientales variadas. Un enfoque único que el equipo está explorando es un vehículo explorador de Marte equipado con ingeniosas ruedas curvas que, como las patas de un lagarto del desierto, pueden “nadar” en la arena.
te puede gustar
Un grupo de investigación de la Universidad de Würzburg ha descubierto la forma de locomoción del pez de arena, adoptando y adaptando ese movimiento en un vehículo explorador de Marte que, según se informa, supera a otras formas de navegar a través de la arena.
En colaboración con investigadores del DLR en Bremen, Alemania, especialistas de la Universidad de Würzburg han diseñado ruedas de rover que imitan las características de movilidad de los peces de arena y la interacción con el suelo, generando fuerzas tanto longitudinales como laterales. Ese movimiento deja huellas sinusoidales o en forma de S en la arena.
Bioinspirado
La maquinaria de Marte debe hacer frente a arena, grava, pendientes y, en general, terrenos irregulares manteniendo su movilidad, estabilidad y eficiencia.
Marco Schmidt, informático universitario y director de la Cátedra de Sistemas y Sensores Integrados para la Observación de la Tierra (ESSEO), lidera la investigación sobre movilidad bioinspirada.

El equipo de Schmidt probó el rover en arena y en terreno abierto, trabajando con el Centro Alemán de Investigación de Inteligencia Artificial en Bremen y la Universidad de Bremen.
Los resultados mostraron que el vehículo se mueve de forma estable sobre arena, aunque los experimentos también arrojaron indicaciones claras de mejora, afirma Schmidt.
La idea de locomoción del pez de arena ha sido adoptada de Scincus scincus, un lagarto que se encuentra en el desierto del Sahara y que es capaz de excavar y luego literalmente “nadar” a través de la arena del desierto para cazar o escapar de los depredadores.
Qué leer a continuación
Soluciones de movilidad
En la universidad se está trabajando en la técnica de movilidad y se prevén mejoras adicionales para mejorar el rendimiento en terrenos mixtos. El equipo de ESSEO tiene como objetivo ampliar su contribución a VaMEx hacia la movilidad impulsada por software.
Los planes de investigación también exigen el desarrollo de estrategias de control que tengan en cuenta explícitamente el deslizamiento, el hundimiento y la interacción entre el terreno y las ruedas. Un resultado sería un comportamiento más estable y adaptable del rover en entornos granulares.
“Crear soluciones de movilidad que puedan conducir de forma fiable y eficiente a través de vastos campos de dunas en Marte, no sólo en Valles Marineris, sino en todo el planeta, es clave para la futura exploración de Marte, tanto robótica como tripulada”, añade Pascal Lee del Instituto SETI, Mars Institute, Ceres Robotics y el Centro de Investigación Ames de la NASA, que no está asociado con este estudio.
“Este desarrollo tecnológico bioinspirado es a la vez innovador e intrigante”, dijo Lee a Space.com.
Para obtener detalles sobre el trabajo del DLR en vehículos exploradores, rastreadores y drones en Marte: el proyecto Valles Marineris Explorer, visite el sitio web del proyecto.